
Mạch Điều Khiển Động Cơ Bước TB6600 sử dụng IC TB6600HQ/HG, dùng cho các loại động cơ bước: 42/57/86 2 pha hoặc 4 dây có dòng tải là 4A/42VDC. Ứng dụng của mạch điều khiển động cơ bước TB6600 trong làm máy như CNC, Laser hay các máy tự động khác.
THÔNG SỐ KỸ THUẬT
+ Nguồn đầu vào là 9V – 42V.
+ Dòng cấp tối đa là 4A.
+ Ngõ vào có cách ly quang, tốc độ cao.
+ Có tích hợp đo quá dòng quá áp.
+ Cân nặng: 200G.
+ Kích thước: 96 * 71 * 37mm.
Cài đặt và ghép nối:
DC+: Nối với nguồn điện từ 9 – 40VDC
Xem Thêm : vì sao phải bảo vệ rừng
DC- : Điện áp (-) âm của nguồn
A+ và A -: Nối vào cặp cuộn dây của động cơ bước
B+ và B- : Nối với cặp cuộn dây còn lại của động cơ
PUL+: Tín hiệu cấp xung điều khiển tốc độ (+5V) từ BOB cho M6600
PUL-: Tín hiệu cấp xung điều khiển tốc độ (-) từ BOB cho M6600
DIR+: Tín hiệu cấp xung đảo chiều (+5V) từ BOB cho M6600
DIR-: Tín hiệu cấp xung đảo chiều (-) từ BOB cho M6600
ENA+ và ENA -: khi cấp tín hiệu cho cặp này động cơ sẽ không có lực momen giữ và quay nữa
Xem Thêm : Cách tạo liên kết giữa các bảng trong mysql
Có thể đấu tín hiệu dương (+) chung hoặc tín hiệu âm (-) chung
Cài đặt cường độ dòng điện I(A) SW4 SW5 SW6 4.0 1 1 1
3.5
0 1 1 3.0 1 0 1 2.5 0 0 1 2.0 1 1 0 1.5 0 1 0 1.0 1 0 0 0.5 0 0 0
Cài đặt vi bước cho driver Micro Pulse/rev SW1 SW2 SW3 OFF 0 0 0 0 1 200 0 0 1 1/2A 400 0 1 0 1/2B 400 0 1 1 1/4 800 1 0 0 1/8 1600 1 0 1 1/16 3200 1 1 0 OFF 0 1 1 1
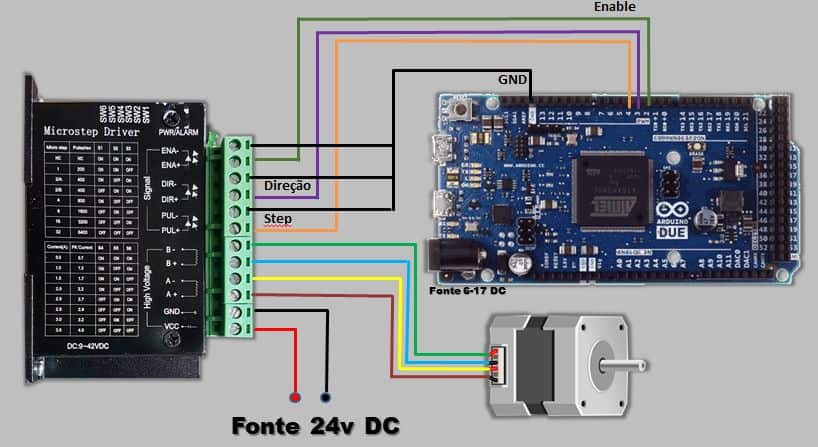
Sơ đồ nối dây mạch điều khiển động cơ bước TB6600
HÌNH ẢNH SẢN PHẨM

CODE MẪU
/* Kết nối: TB6600 Arduino ENA+ 8 DIR+ 2 PUL+ 5 ENA- GND DIR- GND PUL- GND A+ A- B+ B- kết nối với động cơ Nguồn đầu vào là 9V – 42V. */ const int stepPin = 5; const int dirPin = 2; const int enPin = 8; void setup() { // Sets the two pins as Outputs pinMode(stepPin,OUTPUT); pinMode(dirPin,OUTPUT); pinMode(enPin,OUTPUT); digitalWrite(enPin,LOW); } void loop() { digitalWrite(dirPin,HIGH); // Enables the motor to move in a particular direction // Makes 200 pulses for making one full cycle rotation for(int x = 0; x < 800; x++) { digitalWrite(stepPin,HIGH); delayMicroseconds(500); digitalWrite(stepPin,LOW); delayMicroseconds(500); } delay(1000); // One second delay digitalWrite(dirPin,LOW); //Changes the rotations direction // Makes 400 pulses for making two full cycle rotation for(int x = 0; x < 800; x++) { digitalWrite(stepPin,HIGH); delayMicroseconds(500); digitalWrite(stepPin,LOW); delayMicroseconds(500); } delay(1000); }
Nguồn: https://xettuyentrungcap.edu.vn
Danh mục: Kiến thức



